- 菜单

港珠澳大桥多波束测量扫测
T50-P系统快速精准扫描,项目成本大降,提前完成
| 项目简介
本项目位于珠海九州岛海域港珠澳大桥及东西人工岛附近测量桥墩情况以及对沉管隧道进行扫测;本项目测区范围大,测量环境位于离岸13km的海域,测量条件较差,测量区域约10Km*2Km,项目要求清晰扫测出桥墩状态以及沉管隧道,对港珠澳大桥建设期的水下地形评估,确定港珠澳大桥桥墩状态;通航航路有无受到影响。
| 项目挑战
桥墩水下部分传统船舶测量方案都无法扫测到,船舶靠过去由于传统设备都是声纳向下测量,这使得水下桥墩智能扫测到一个角或者部分位置,无法扫测全貌,如何能扫测到侧面是个关键;同时该海域船舶较多,海浪比较大,对于水上测量船舶的三位姿态定位精度严重影响到水下测量的精度。
| 解决方案
采用ResonSeaBat T50-P型多波束测深系统的方法进行测量,该多波束具备相同的波束角1°*0.5°和相同的水深分辨率,同时更加便捷,换能器重量减少,方便运输和快速部署,其水深扫测开角165°,同时可调节扫测方向和角度,解决了侧面扫测的问题,最大可覆盖5.5倍水深。双频换能器配备了200和400KHz两个工作频率,测量深度范围可达0.5m—400m,512个等距波束在整条测量带上具有超高数据密度。可实现快速图像生成,及时完成测量任务。
165°开角侧面扫测
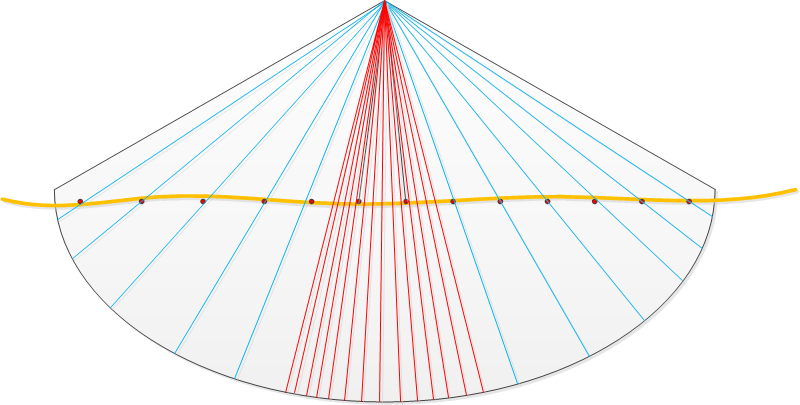
姿态仪是多波束系统中重要的一部分,没有姿态仪,多波束数据没法使用,姿态精度低,数据效果较差;
如下图所示,姿态仪要用来改正船体的姿态,得到准确的波束指向,从而得到准确的水深值。
本次项目的另一个重点就是姿态仪的选择及精准安装,船体姿态误差估计:
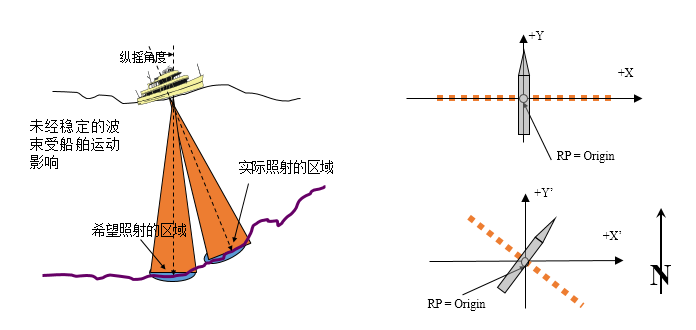
横摇是沿着船航行方向(Y轴)旋转的角度,横摇对深度测量的影响很大,一个横摇误差为1°,那么一个50米的斜距(即水深为17米左右时)将导致0.6米的深度误差。0.02°误差,50米的斜距导致0.012米的误差,即水深为17米左右时,边缘波束会有0.012米的误差。
50米水深时,边缘波束斜距为146米,横摇误差为1°时,将导致1.752米的深度误差。0.02°误差,斜距为146米时导致0.35m的误差。
纵摇是沿着船垂直方向(X轴)旋转的角度,纵摇对水深测量的影响也是很大,对深度测量值的精度不利。横摇为1°的误差时,声纳探头到达海底的距离25米的情况下(即水深为25米),在航线方向的定位误差有0.4米。
偏航是船航行轴线方向与绕Z轴旋转角度在水平面上的投影夹角。偏航对于位于正下方的波速没有影响,但是对于外围波速的影响较大,深度越大误差越大。偏航对位于声纳阵下方的中心波束的影响可以忽略不计,越向外围波速影响越大。偏航误差1°时,声纳基阵垂直安装且到达海底的距离为25米的情况下(即水深为25米),定位误差0.4米。
以下左图为姿态精度较差的效果图,整个扫测过程中边缘波束不重合的地方,误差较大;右图为姿态精度较好的效果图,扫测的结果中两个测线间重合程度比较好,精度高。
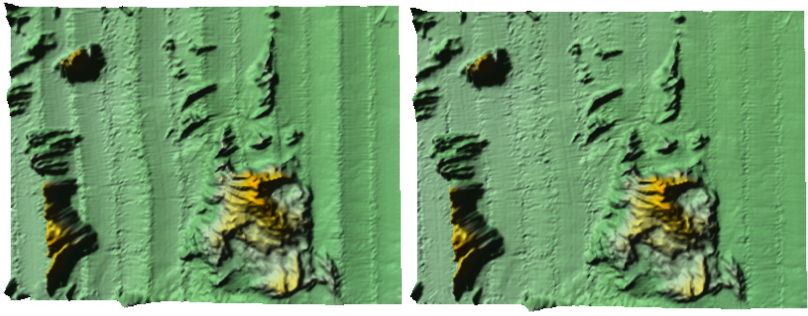
本项目采用了0.01度的高端姿态仪,确保了姿态的精准度;
内业处理环节中,测量数据采用Teledyne PDS Control Center软件进行数据处理,在导入声剖数据后对点云数据进行滤波、去噪等处理,在删除噪点的同时,也可以实时查看桥墩情况,处理完成后导出并保存数据。
以下是项目的成果图。
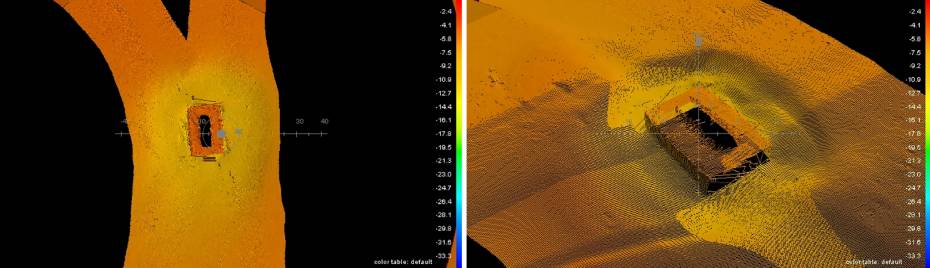
左为桥墩俯视图,右为桥墩侧视图
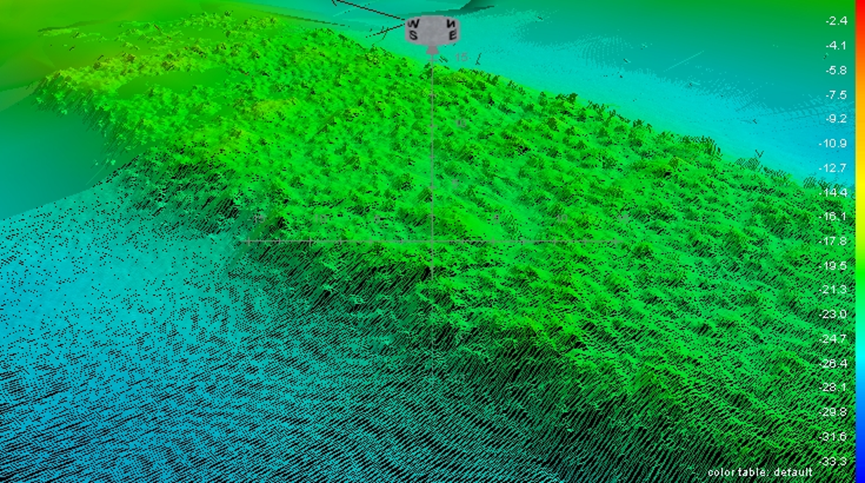
沉管隧道扫测图
| 项目成效
用户在拿到方案后,从设备的选型到设备进场,完成整个项目扫测及成果交付,总共不到90天的时间,比预计的120天时间节约了工期30天,节省了人力及船舶等费用。T50-P的便携性,使得测量船舶的选择也比较容易,一般的快艇和渔船都能安装,适合的船舶容易找到的同时还大大节约了租船成本;T50-P多波束系统165°的大开角及0.5°高精度可达6mm精细度的波束角满足了本次快速侧面扫测及精准度的要求,避免了使用高昂的水下声纳及水下机器人,节约了项目成本,使得用户能够顺利完成该项目。

